4312
Share

基本信息
戚煜华,博彩平台-全球最大的博彩平台 ,副教授,硕导。2024年入选中国科协青年人才托举工程。
- 电子邮箱:[email protected]
- 办公地址:中山大学南校园第二教学楼613房
- 研究方向:无人机、机器人、Multi-robot SLAM、空地无人集群系统应用等
- 招生专业:计算机科学与技术学硕,电子信息专硕
- 招生要求:
- 做机器人研究令你感到兴奋;
- 良好的编程能力,熟悉C++/python,能使用常见的数据结构和算法进行开发;
- 了解基本的机器人系统软件开发工具(Linux、Git、ROS、CMake);
有团队协作精神,乐于分享,有强烈的科研欲望或有一定的科研能力;
教育经历
- 2010.09 - 2014.06:北京理工大学,宇航博彩平台 ,飞行器设计与工程专业,学士;
- 2014.02 - 2014.06:慕尼黑工业大学,本科交换生(本科毕业设计);
- 2014.09 – 2020.06:北京理工大学,宇航博彩平台 ,航空宇航科学与技术(硕博连读),博士;
- 2016.06 – 2016.08:以色列理工博彩平台
,短期访问
- 2019.02 – 2019.08:多伦多大学,联合培养博士/访问学者(合作导师:Hugh H.T. Liu)。
工作经历
- 2020.09 - 2023.09:博彩平台-全球最大的博彩平台
,博士后(合作导师:陈洪波教授);
- 2023.09 - 2025.04:博彩平台-全球最大的博彩平台
,特聘副研究员;
- 2025.04 – 至今:博彩平台-全球最大的博彩平台 ,副教授。
科研项目
- 典型***验证,KJW,2024年-2025年,主持
- 基于深度强化学习的集群无人系统路径规划算法研究,教育部,2022年-2023年,主持
- 面向集群无人系统的感知数据集采集与实验平台开发(合同金额:150万元),企业委托,2022年-2024年,主持
- 空地无人集群****实验平台(合同金额:120万元),国防科技创新研究院,2021年-2022年,主持
- 基于无人机和机器视觉的塔式起重机智能检测技术研究,广东省建科院,2023年-2024年,主持
- 基于组件化PNT平台的协同导航与智能控制及应用验证,国家重点研发计划,2022年-2025年,主要参与
发表论文
- Zhiqiang Chen, Yuhua Qi*, Dapeng Feng, Xuebin Zhuang, Hongbo Chen et al., Heterogeneous LiDAR Dataset for Benchmarking Robust Localization in Diverse Degenerate Scenarios, The International Journal of Robotics Research (IJRR 2025)
- Dapeng Feng, Zhiqiang Chen, Yizhen Yin, Shipeng Zhong, Yuhua Qi*, Hongbo Chen*, CaRtGS: Computational Alignment for Real-Time Gaussian Splatting SLAM, IEEE Robotics and Automation Letters (RAL 2025)
- Dapeng Feng, Yuhua Qi*, Shipeng Zhong, Zhiqiang Chen, Qiming Chen, Hongbo Chen et al. , S3E: A Multi-Robot Multimodal Dataset for Collaborative SLAM, IEEE Robotics and Automation Letters (RAL 2024,RAL Best Paper Award - Honorable Mention)
- Zhiqiang Chen, Hongbo Chen, Yuhua Qi*, Shipeng Zhong, Dapeng Feng, Jin Wu et al., RELEAD: Resilient Localization with Enhanced LiDAR Odometry in Adverse Environments, IEEE International Conference on Robotics and Automation (ICRA 2024)
- Shipeng Zhong, Hongbo Chen, Yuhua Qi*, Dapeng Feng, Zhiqiang Chen, Jin Wu et al., CoLRIO: LiDAR-Ranging-Inertial Centralized State Estimation for Robotic Swarms, IEEE International Conference on Robotics and Automation (ICRA 2024)
- Ren Jin, Zikai Jia, Xingyu Yin, Yi Niu, Yuhua Qi*, Domain Feature Decomposition for Efficient Object Detection in Aerial Images,Remote Sensing(2024)
- Shipeng Zhong, Yuhua Qi*, Zhiqiang Chen, Jin Wu, Hongbo Chen et al., DCL-SLAM: A Distributed Collaborative LiDAR SLAM Framework for a Robotic Swarm,IEEE Sensors Journal (2023)
- Dapeng Feng, Xuebin Zhuang, Zhiqiang Chen, Shipeng Zhong, Yuhua Qi*, Hongbo Chen, Hongjun Ma, Position Information Encoding FPN for Small Object Detection in Aerial Images, Neural Computing and Applications (2023)
- Jin Wu, Chaoqun Wang, Chong Li, Yi Jiang, Chengxi Zhang, Yulong Huang, Yuhua Qi et al., On Similarity Transformation Problems: Globally Optimal Results and Applications,IEEE Transactions on Instrumentation and Measurement(TIM 2023)
- Zhiqiang Chen, Yuhua Qi*, Shipeng Zhong, Dapeng Feng, Qiming Chen, Hongbo Chen, SCL-SLAM: A Scan Context-enabled LiDAR SLAM Using Factor Graph-Based Optimization, IEEE International Conference on Unmanned Systems (ICUS 2022,会议最佳论文)
- Yuhua Qi, Yang Zhu, Jianan Wang, Jiayuan Shan, Hugh Liu, MUDE-based Control of Quadrotor for Accurate Attitude Tracking, Control Engineering Practice (CEP 2020)
专利
- 戚煜华、陈洪波、庄学彬等,一种多模态数据采集装置及数据采集系统,实用新型专利
- 戚煜华、陈洪波、陈志强等,考虑感知退化的多传感器位姿估计方法和装置,发明专利
- 戚煜华、陈洪波、庄学彬等,一种无人机相对位姿定位方法及系统,发明专利
戚煜华、陈晓慧、钟仕鹏等,一种四旋翼无人机,实用新型专利
竞赛比赛
- “元戎启航-2023A”无人机集群反制技术挑战赛实物赛第一名,2023年
- “ICCV 2023 SLAM Challenge”Lidar Inertial Track 5th Place Award,2023年
“International Micro Air Vehicles, Conferences and Competitions”第三名,2017年
开源项目
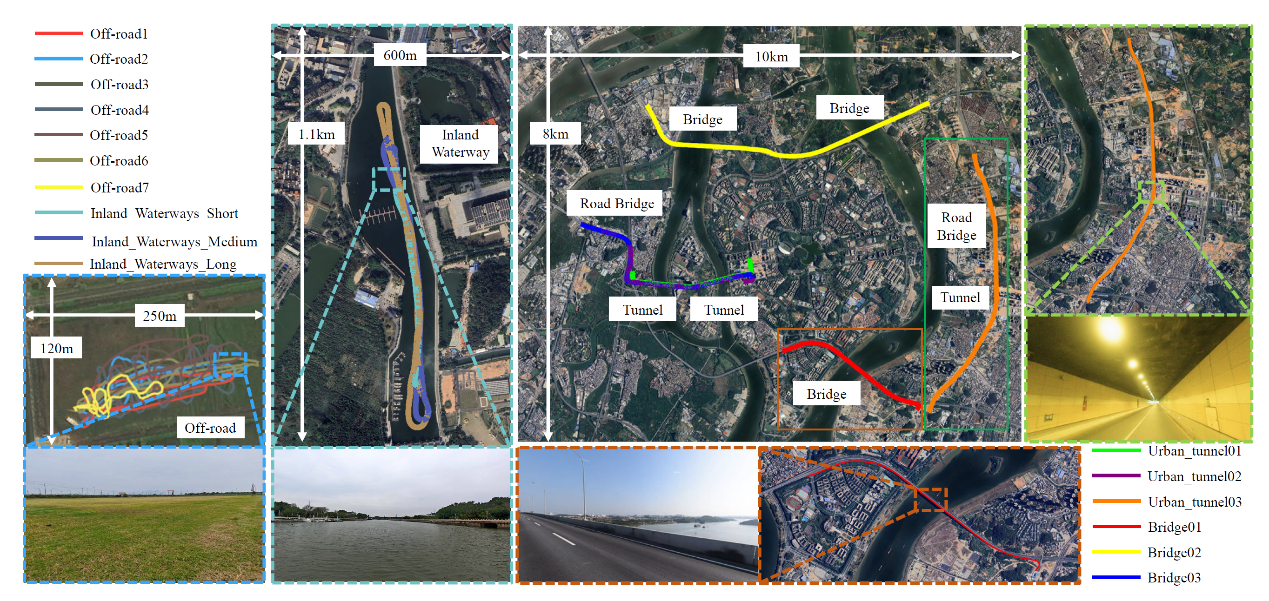
1.业内首个针对退化场景的集群SLAM数据集 - GEODE
- 项目网址://github.com/PengYu-Team/GEODE_dataset(欢迎star)
2.业内首个室内外多传感器集群SLAM数据集 - S3E
- 项目网址://github.com/DapengFeng/S3E(欢迎star)

3.分布式激光SLAM算法 - DCL-SLAM
- 项目网址://github.com/PengYu-Team/DCL-SLAM(欢迎star)

科研成果展示





